Fujitsu memperkenalkan Spatial World Model, teknologi physical AI terbaru yang memungkinkan robot memahami dinamika ruang secara real-time dan memprediksi perilaku manusia. Inovasi ini membuka era kolaborasi manusia robot yang lebih aman, cerdas, dan efisien.
Kebutuhan akan physical AI, atau AI yang memahami hukum fisika dan dapat bertindak secara otonom menjadi semakin mendesak, terutama di Jepang yang menghadapi kekurangan tenaga kerja. Aplikasi AI saat ini berjalan baik di lingkungan terstruktur seperti pabrik atau gudang, namun masih kesulitan bekerja di ruang yang dinamis seperti rumah dan kantor, tempat pergerakan manusia tidak dapat diprediksi dan susunan objek sering berubah. Kondisi ini membuat sistem existing sulit menilai dinamika ruang secara akurat, sehingga kolaborasi manusia robot dalam skala besar belum optimal.
Fujitsu mengembangkan Spatial World Model, teknologi physical AI baru yang memungkinkan pemahaman ruang secara real-time sekaligus memprediksi perilaku aktor dan objek di masa depan. Teknologi ini difokuskan untuk menciptakan kerja sama yang aman dan efisien antara manusia dan robot, serta koordinasi optimal di antara robot otonom. Fujitsu akan menampilkan teknologi ini di CES 2026 dan melanjutkan demonstrasi teknis sepanjang tahun fiskal 2026.
Inovasi ini dibangun dari fondasi teknologi Computer Vision Fujitsu yang digunakan untuk analisis aliran manusia dan deteksi perilaku abnormal serta platform AI digital seperti Fujitsu Kozuchi AI Agent . Pengembangan ini juga merupakan bagian dari riset berkelanjutan di Spatial Robotics Research Center yang didirikan pada April 2025.
Pemahaman Ruang Real-Time
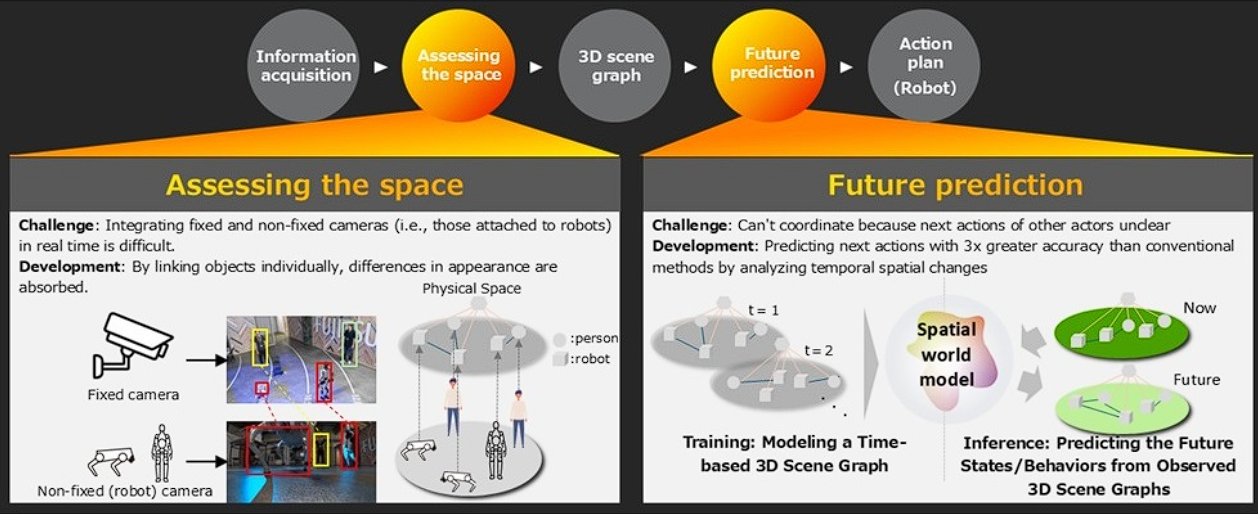
Spatial World Model bekerja dengan membangun representasi ruang menggunakan 3D scene graphs (grafik adegan 3D), yaitu struktur data hierarkis yang mengorganisasi seluruh objek sebagai node dalam sebuah graf. Berbeda dari pendekatan pixel level integration yang rentan terhadap variasi visual antar kamera, pendekatan berbasis struktur memungkinkan pemahaman ruang yang stabil meski terdapat perbedaan bidang pandang atau distorsi pada kamera tetap maupun kamera bergerak. Hasilnya, robot dapat memperoleh gambaran ruang nyata yang kompleks dan berubah cepat secara lebih presisi.
Kemampuan kedua adalah prediksi perilaku dan keadaan masa depan. Dengan memodelkan hubungan sebab-akibat antara manusia, robot, dan objek, teknologi ini mampu menafsirkan maksud perilaku dan memperkirakan tindakan berikutnya secara akurat. Pendekatan ini melampaui model sebelumnya yang hanya memahami lingkungan terdekat robot. Dengan cakupan spasial yang lebih luas, sistem dapat membantu mencegah benturan, meningkatkan keselamatan, dan menghasilkan rencana aksi kolaboratif yang optimal untuk banyak robot otonom dalam satu ruang.
Dalam pengujian pada data tolok ukur akademis, Spatial World Model terbukti dapat meningkatkan akurasi estimasi maksud perilaku hingga tiga kali lipat. Inovasi ini mempercepat terwujudnya masyarakat di mana manusia dan robot dapat bekerja berdampingan secara harmonis untuk menghadapi keterbatasan tenaga kerja dan meningkatkan produktivitas industri.