Helix 02 dari Figure AI memperkenalkan sistem neural tunggal yang mampu mengendalikan seluruh tubuh robot humanoid, menggabungkan berjalan dan manipulasi objek dalam satu arsitektur terpadu.
Robot humanoid sering mengalami kesulitan ketika harus bergerak dan memanipulasi objek secara bersamaan. Selama bertahun-tahun, sistem robotik biasanya memisahkan kemampuan berjalan dan penggunaan tangan ke dalam modul yang berbeda. Pendekatan ini membuat robot sulit beradaptasi ketika kondisi lingkungan berubah.
Figure AI memperkenalkan Helix 02 sebagai sistem kecerdasan baru yang mampu mengendalikan seluruh tubuh robot secara terpadu. Teknologi ini memungkinkan robot bergerak, menjaga keseimbangan, dan memanipulasi objek melalui satu sistem neural yang bekerja langsung dari input visual.
Dalam demonstrasinya, robot humanoid mampu menyelesaikan tugas dapur secara mandiri selama beberapa menit. Robot berjalan menuju mesin pencuci piring, memindahkan peralatan, dan mengatur ulang objek tanpa bantuan manusia atau pengendalian jarak jauh.
Kemampuan ini menjadi contoh dari konsep loco-manipulation, yaitu kemampuan robot untuk bergerak sambil melakukan manipulasi objek secara terus-menerus dalam satu rangkaian tindakan.
Arsitektur Tiga Lapisan
Helix 02 dibangun dengan arsitektur tiga lapisan yang bekerja pada skala waktu berbeda untuk mengendalikan seluruh tubuh robot.
- System 0 berfungsi sebagai pengendali gerakan dasar yang menjaga keseimbangan dan koordinasi tubuh robot. Sistem ini dilatih menggunakan lebih dari 1.000 jam data gerakan manusia.
- System 1 menghubungkan sensor robot dengan seluruh aktuator tubuh melalui jaringan neural visuomotor. Sistem ini menerjemahkan input visual dan sensor sentuhan menjadi gerakan robot secara real-time.
- System 2 berperan sebagai lapisan penalaran tingkat tinggi yang memahami situasi lingkungan dan menentukan urutan tugas yang harus dilakukan robot.
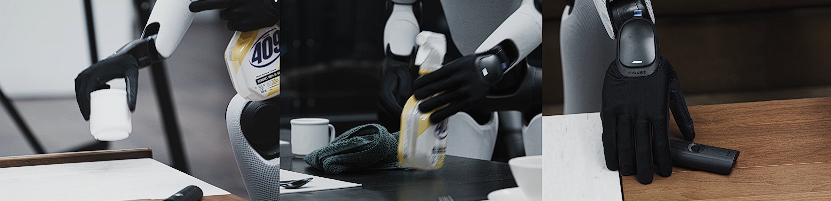
- Integrasi sensor mencakup kamera kepala, kamera telapak tangan, serta sensor sentuhan pada ujung jari.
- Robot dapat menyesuaikan gerakan tubuh secara dinamis saat memegang objek atau berjalan di lingkungan yang berubah.
- Sistem mampu melakukan manipulasi objek kecil berkat sensor taktil yang sensitif terhadap tekanan ringan.
- Arsitektur ini memungkinkan robot menggunakan seluruh tubuhnya sebagai alat kerja, bukan hanya tangan.
- Semua komponen bekerja secara terhubung sehingga robot dapat merencanakan dan mengeksekusi tindakan secara berkelanjutan.